Robot Workspace Matlab

3d Data Evaluation Robot Workspace Matlab Answers Matlab Central

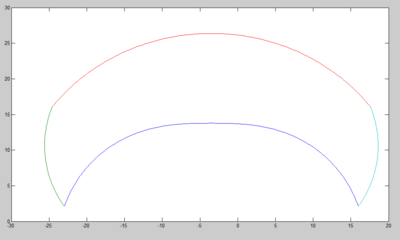
Github Happysword Rrr Robot Workspace A Simple Gui Using Matlab For Creating 2d Workspace Of Rrr Robot

A Simple Algorithm Of Robot Arm Workspace Based On Matlab Programmer Sought

Workspace Of The Manipulator Scorbot Er 4pc Robot Download Scientific Diagram

Robot Workspace Robot Academy
Https Scholar Uwindsor Ca Cgi Viewcontent Cgi Article 5808 Context Etd

Workspace which is the volume in which the robot s end effector may move.
Robot workspace matlab.
Https Arxiv Org Pdf 1707 04820

Robot Manipulator Workspaces Lecture 7a Intro2robotics Youtube
Theoretical Workspace Of 2 Dof Robotic Catheter Tip In Matlab R Download Scientific Diagram

Matlab Simulation Of 4 Ruu Parallel Manipulator Workspace Youtube

Workspace Generated By The In Vivo Robot Download Scientific Diagram

3d Puma Robot Demo File Exchange Matlab Central

Figure 9 From Structure Design And Workspace Calculation Of 6 Dof Underwater Manipulator Semantic Scholar

Dynamic Analysis Of Manipulator Arm For 6 Legged Robot
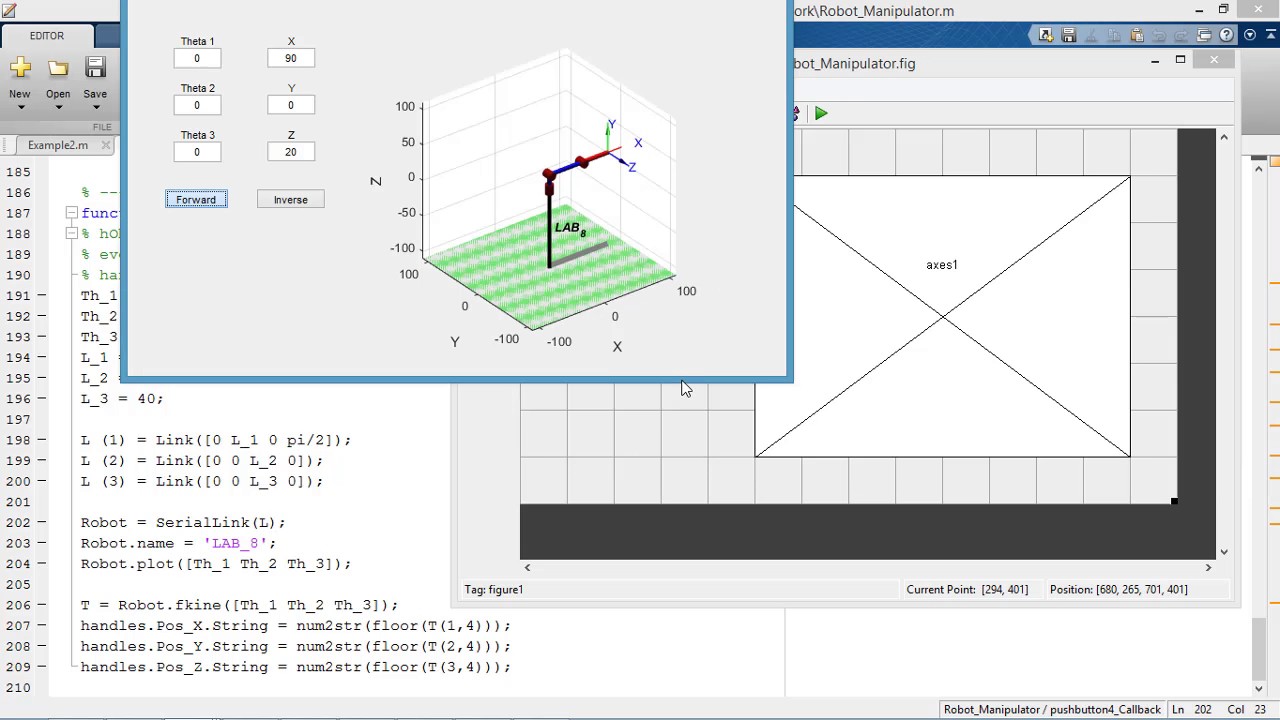
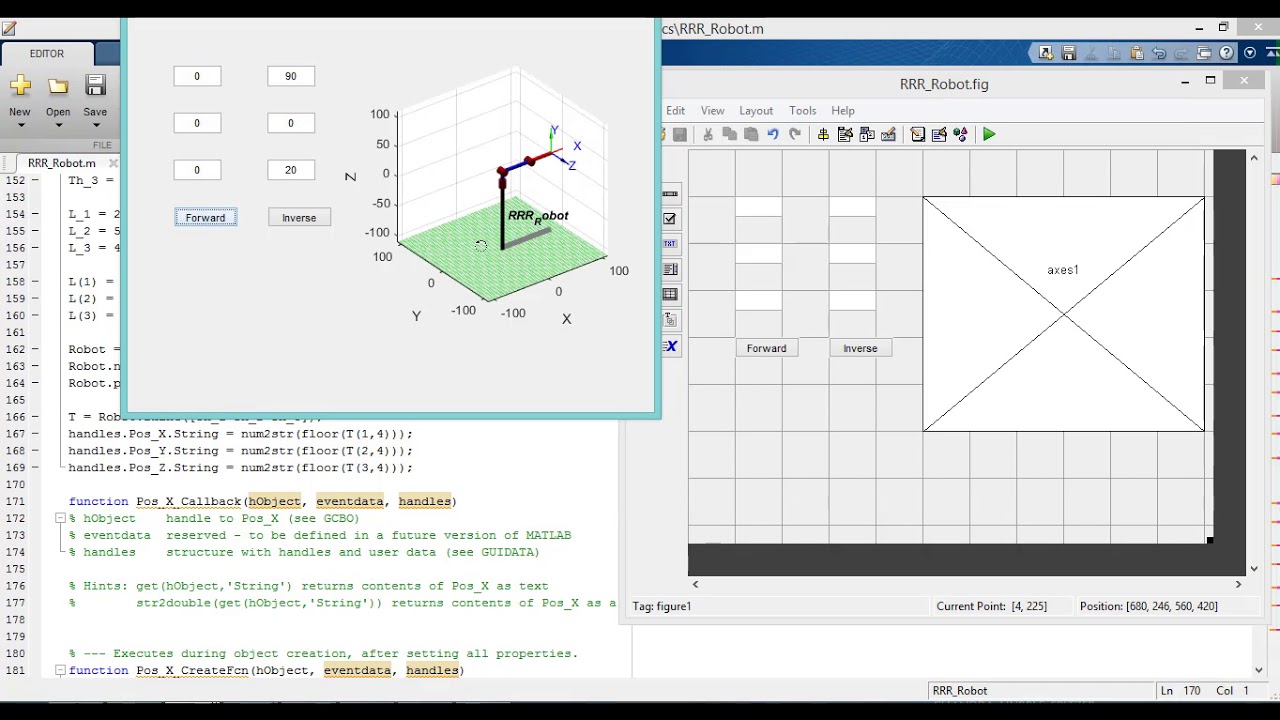
Using Peter Corke Robotics Toolbox With Matlab Gui Forward And Inverse Kinematics Youtube

Matlab Robot Simulation Code

Figure 5 From An Efficient Algorithm For Workspace Generation Of Delta Robot Semantic Scholar

Kinematic Analysis Of Humanoid Robot Hand
Matlab Tool Box For Determining The Workspace Of Mitsubishi Grin

Designing Robot Manipulator Algorithms Youtube

The Gui For Calculus Of Workspace For The Delta Linear 3 Dof Parallel Download Scientific Diagram
How To Create Matlab Gui Robot Arm Simulation Youtube
Design And Control Of A Pantograph Robot Northwestern Mechatronics Wiki
Workspace Of Scara Robot Download Scientific Diagram
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcr1iupzohrslmlwimgr3bl2b Gv0xbkjhr2bpx0j7raxhql410z Usqp Cau

Workspace Of Scara Robot Ibm 7547 Download Scientific Diagram

P Corke Robotics Vision And Control Fundamental Algorithms In Matlab Springer Tracts In Advanced Robotics Pdf Free Download

Delta Parallel Robot Workspace And Dynamic Trajectory Tracking Of Delta Parallel Robot Semantic Scholar
Derive And Apply Inverse Kinematics To Two Link Robot Arm Matlab Simulink Example
Https Ijsea Com Archive Volume8 Issue8 Ijsea08081028 Pdf
Source : pinterest.com
